Servomotor CC de precisión 46S/12V-8A1

Características básicas del servomotor DC: (otros modelos, el rendimiento se puede personalizar)
| 1.Tensión nominal: | CC 12 V | 5.Velocidad nominal: | ≥ 2600 rpm |
| 2.Rango de voltaje de funcionamiento: | CC 7,4 V-13 V | 6.Corriente de bloqueo: | ≤2.5A |
| 3.Potencia nominal: | 25W | 7. Corriente de carga: | ≥1A |
| 4.Dirección de rotación: | El eje de salida CW está arriba | 8. Espacio libre del eje: | ≤1,0 mm |
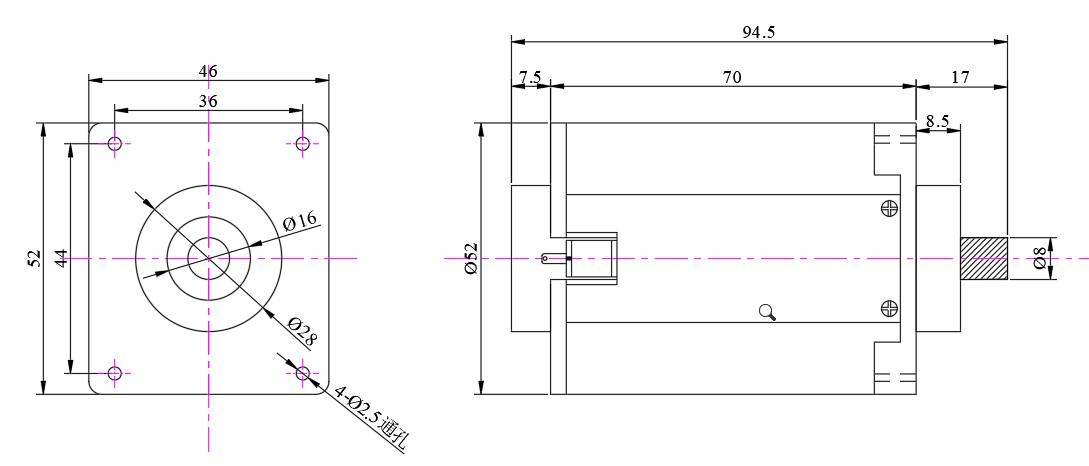
Diagrama de apariencia del producto
Tiempo de vencimiento
Desde la fecha de producción, el período de uso seguro del producto es de 10 años y el tiempo de trabajo continuo es ≥ 2000 horas.
Características del producto
1. Diseño compacto que ahorra espacio;
2.Estructura de rodamiento de bolas;
3. Larga vida útil del cepillo;
4.El acceso externo a las escobillas permite un fácil reemplazo para extender aún más la vida útil del motor;
5. Alto par de arranque;
6.Frenado dinámico para detenerse más rápido;
7.Rotación reversible;
8. Conexión simple de dos cables;
9.Aislamiento clase F, conmutador de soldadura de alta temperatura.
10.Con un funcionamiento estable y con poco ruido, es especialmente adecuado para ocasiones que requieren alta velocidad y poco ruido.
Aplicaciones
Es ampliamente utilizado en los campos del hogar inteligente, dispositivos médicos de precisión, conducción de automóviles, productos electrónicos de consumo, equipos de masaje y cuidado de la salud, herramientas de cuidado personal, transmisión de robots inteligentes, automatización industrial, equipos mecánicos automáticos, productos digitales, etc.
Ilustración de rendimiento



¿Cuáles son las características del servomotor DC?
En un servomotor de CC hay una corriente continua (CC) con terminales positivos y negativos. Entre cada uno de estos terminales, la corriente fluye exactamente en la misma dirección. La inercia del servomotor debe ser menor para mayor precisión y exactitud. Los servos de CC tienen una respuesta rápida, que se logra manteniendo una alta relación par-peso. Además, la característica de velocidad del servo CC debe ser lineal.
Con un servomotor de CC, el control de corriente es mucho más sencillo que con un servomotor de CA porque el único requisito de control es la magnitud de la corriente del inducido. La velocidad del motor se controla mediante modulación de ancho de pulso (PWM) controlada por el ciclo de trabajo. El flujo de control se utiliza para gestionar el par, lo que da como resultado una consistencia confiable en cada ciclo de actividad.
Los servomotores de CC tienden a tener mayor inercia que los motores de CA de jaula de ardilla. Esto y una mayor resistencia a la fricción del cepillo son los principales factores que impiden su uso en servos de instrumentos. En tamaños pequeños, los servomotores de CC se utilizan principalmente en sistemas de control de aeronaves donde las limitaciones de peso y espacio requieren que el motor entregue la máxima potencia por unidad de volumen. Por lo general, se utilizan para trabajos intermitentes o cuando se requiere un par de arranque inusualmente alto. Los servomotores de CC también se pueden utilizar en actuadores electromecánicos, controladores de procesos, equipos de programación, robots de automatización industrial, equipos de máquinas herramienta CNC y muchas otras aplicaciones de naturaleza similar.
Un servomotor de CC es un conjunto que consta de cuatro componentes principales, a saber, un motor de CC, un dispositivo sensor de posición, un conjunto de engranajes y un circuito de control. La velocidad requerida de un motor de CC depende del voltaje aplicado. Para controlar la velocidad del motor, el potenciómetro produce un voltaje que se aplica a una de las entradas del amplificador de error.







