Servomotor CC de precisión 46S/12V-8B1

Características básicas del servomotor DC: (otros modelos, el rendimiento se puede personalizar)
| 1.Tensión nominal: | CC 12 V | 5.Velocidad nominal: | ≥ 2600 rpm |
| 2.Rango de voltaje de funcionamiento: | CC 7,4 V-13 V | 6.Corriente de bloqueo: | ≤2.5A |
| 3.Potencia nominal: | 25W | 7. Corriente de carga: | ≥1A |
| 4.Dirección de rotación: | El eje de salida CW está arriba | 8. Espacio libre del eje: | ≤1,0 mm |
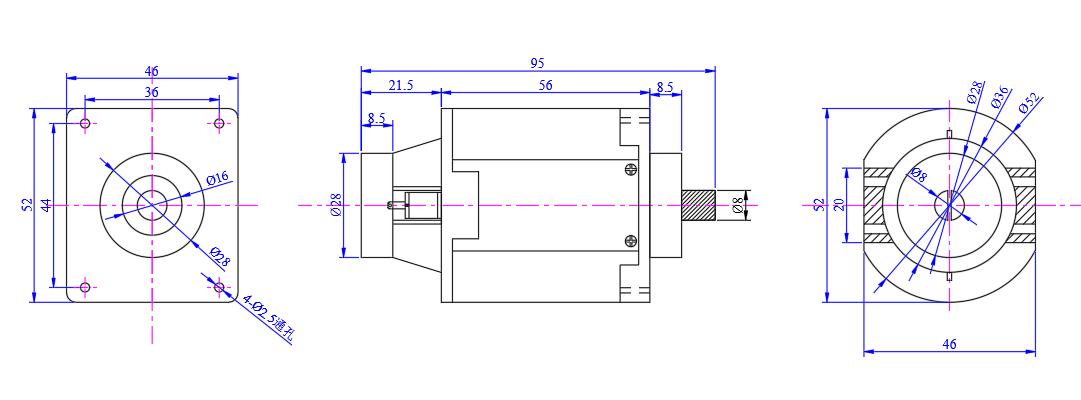
Icono de apariencia del producto
Tiempo de vencimiento
Desde la fecha de producción, el período de uso seguro del producto es de 10 años y el tiempo de trabajo continuo es ≥ 2000 horas.
Características del producto
1. Diseño compacto que ahorra espacio;
2.Estructura de rodamiento de bolas;
3. Larga vida útil del cepillo;
4.El acceso externo a las escobillas permite un fácil reemplazo para extender aún más la vida útil del motor;
5. Alto par de arranque;
6.Frenado dinámico para detenerse más rápido;
7.Rotación reversible;
8. Conexión simple de dos cables;
9.Aislamiento clase F, conmutador de soldadura de alta temperatura.
Aplicaciones
Es ampliamente utilizado en los campos del hogar inteligente, dispositivos médicos de precisión, conducción de automóviles, productos electrónicos de consumo, equipos de masaje y cuidado de la salud, herramientas de cuidado personal, transmisión de robots inteligentes, automatización industrial, equipos mecánicos automáticos, productos digitales, etc.
Tres ventajas
1.Buen equilibrio motor:
1.1 Adopte tecnología avanzada para mejorar el equilibrio del motor y reducir en gran medida el ruido generado por el funcionamiento del motor.
2. Mejor combinación de rendimiento de las escobillas de carbón:
2.2 Mejorar la vida útil del motor y las escobillas de carbón. (¡¡¡Las escobillas de carbón ya no son consumibles!!!)
3.Buen magnetismo:
3.3 El consumo de energía se reduce efectivamente cuando se genera el mismo par magnético.
Ilustración de rendimiento



Principio de conducción
1. El servo depende principalmente de pulsos para su posicionamiento. Básicamente, se puede entender que cuando el servomotor recibe un pulso, girará el ángulo correspondiente al pulso para lograr el desplazamiento. Debido a que el servomotor en sí tiene la función de enviar pulsos, el servo cada vez que el motor gira un ángulo, enviará una cantidad correspondiente de pulsos, de modo que haga eco con los pulsos recibidos por el servomotor, o llamado circuito cerrado. . De esta forma, el sistema sabrá cuántos pulsos se envían al servomotor y cuántos pulsos se reciben al mismo tiempo. El pulso regresa, de modo que la rotación del motor se puede controlar con precisión para lograr un posicionamiento preciso, que puede alcanzar 0,001 mm.
El servomotor de CC se refiere específicamente al servomotor con escobillas de CC: el motor tiene un costo bajo, una estructura simple, un gran par de arranque, un amplio rango de velocidad, un control fácil y requiere mantenimiento, pero es fácil de mantener (reemplace las escobillas de carbón) y lo hará. generar interferencias electromagnéticas. El entorno tiene requisitos. Por lo tanto, se puede utilizar en ocasiones industriales y civiles comunes que son sensibles al costo.
Los servomotores de CC también incluyen servomotores de CC sin escobillas: los motores son de tamaño pequeño, livianos, de gran potencia, de respuesta rápida, de alta velocidad, de pequeña inercia, de rotación suave, de torque estable y de potencia del motor limitada. . Es fácil realizar inteligencia y su método de conmutación electrónica es flexible y puede ser conmutación de onda cuadrada o conmutación de onda sinusoidal. El motor no requiere mantenimiento y no tiene pérdida de escobillas de carbón. Tiene alta eficiencia, baja temperatura de funcionamiento, bajo nivel de ruido, pequeña radiación electromagnética y larga vida útil. Se puede utilizar en diversos entornos.







