Servomotor CC de precisión 46S/12V-8C1

Características básicas del servomotor DC: (otros modelos, el rendimiento se puede personalizar)
| 1.Tensión nominal: | CC 12 V | 5.Velocidad nominal: | ≥ 2600 rpm |
| 2.Rango de voltaje de funcionamiento: | CC 7,4 V-13 V | 6.Corriente de bloqueo: | ≤2.5A |
| 3.Potencia nominal: | 25W | 7. Corriente de carga: | ≥1A |
| 4.Dirección de rotación: | El eje de salida CW está arriba | 8. Espacio libre del eje: | ≤1,0 mm |
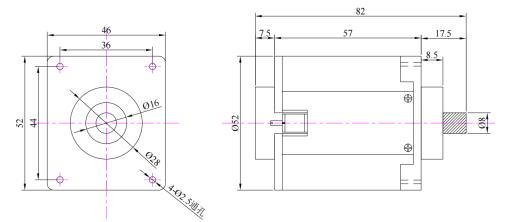
Diagrama de apariencia del producto
Tiempo de vencimiento
A partir de la fecha de producción, el período de uso seguro es de 10 años, tiempo de trabajo continuo ≥2000 horas.
Características del producto
1. Diseño compacto y que ahorra espacio;
2. Estructura de rodamientos de bolas;
3, larga vida útil del cepillo;
4, el acceso externo del cepillo permite un fácil reemplazo y puede extender aún más la vida útil del motor;
5. Alto par de arranque;
6, puede realizar un frenado dinámico para detenerse más rápido;
7. Rotación reversible;
8. Conexión sencilla de dos hilos;
9, aislamiento de grado F, utilizando conmutador de soldadura de alta temperatura.
Aplicaciones
Es ampliamente utilizado en hogares inteligentes, equipos médicos de precisión, campos de conducción de automóviles, series de productos electrónicos de consumo, equipos de salud para masajes, herramientas de cuidado personal, transmisiones de robots inteligentes, automatización industrial, equipos mecánicos automáticos, productos digitales y otros campos.
Principio de funcionamiento del servomotor.
Siempre que el servo dependa del pulso para posicionarse, básicamente se puede entender de esta manera: el servomotor recibe un pulso y girará el ángulo correspondiente del pulso para lograr el desplazamiento. Debido a que el servomotor en sí tiene la función de enviar pulsos, se enviará el número correspondiente de pulsos para cada ángulo de rotación del servomotor. De esta manera, el pulso recibido por el servomotor se repite o se denomina circuito cerrado. De esta manera, el sistema sabrá cuántos pulsos se envían al servomotor y cuántos pulsos se reciben de regreso, de modo que pueda ser un control muy preciso de la rotación del motor, para lograr un posicionamiento preciso, que puede alcanzar 0,001 mm. .
Ilustración de rendimiento










