Servomotor de CC de precisión 46S/185-8A

Características básicas del servomotor DC: (otros modelos, el rendimiento se puede personalizar)
| 1.Tensión nominal: | CC 7,4 V | 5.Velocidad nominal: | ≥ 2600 rpm |
| 2.Rango de voltaje de funcionamiento: | CC 7,4 V-13 V | 6.Corriente de bloqueo: | ≤2.5A |
| 3.Potencia nominal: | 25W | 7. Corriente de carga: | ≥1A |
| 4.Dirección de rotación: | El eje de salida CW está arriba | 8. Espacio libre del eje: | ≤1,0 mm |
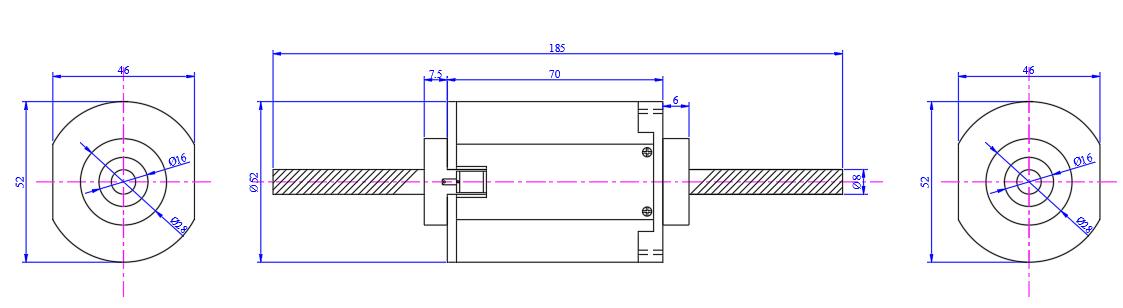
Diagrama de apariencia del producto
Tiempo de vencimiento
Desde la fecha de producción, el período de uso seguro del producto es de 10 años y el tiempo de trabajo continuo es ≥ 2000 horas.
Características del producto
1. Diseño compacto que ahorra espacio;
2.Estructura de rodamiento de bolas;
3. Larga vida útil del cepillo;
4.El acceso externo a las escobillas permite un fácil reemplazo para extender aún más la vida útil del motor;
5.Alto par de arranque;
6.Frenado dinámico para detenerse más rápido;
7.Rotación reversible;
8. Conexión simple de dos cables;
9.Aislamiento clase F, conmutador de soldadura de alta temperatura.
10. Alto rendimiento, alto costo y baja interferencia.
Aplicaciones
Es ampliamente utilizado en los campos del hogar inteligente, dispositivos médicos de precisión, conducción de automóviles, productos electrónicos de consumo, equipos de masaje y cuidado de la salud, herramientas de cuidado personal, transmisión de robots inteligentes, automatización industrial, equipos mecánicos automáticos, productos digitales, etc.
Ilustración de rendimiento



Servosistema: es un sistema de control automático que permite que las cantidades controladas de salida, como la posición, la orientación y el estado de un objeto, sigan cualquier cambio en el objetivo de entrada (o valor dado). La tarea principal del servo es amplificar, transformar y regular la potencia de acuerdo con los requisitos del comando de control, de modo que el par, la velocidad y la posición de salida del dispositivo de accionamiento se puedan controlar de manera muy flexible y conveniente.
Debido a su rendimiento de "servo", se le denomina servomotor. Su función es convertir la señal de control del voltaje de entrada en desplazamiento angular de salida y velocidad angular en el eje para impulsar el objeto de control.
Principio del servomotor CC
El principio de funcionamiento del servomotor de CC es básicamente el mismo que el del motor de CC normal. El par electromagnético se genera por la acción del flujo de aire de la armadura y el flujo magnético del entrehierro para hacer girar el servomotor. Por lo general, el método de control de armadura se utiliza para cambiar la velocidad cambiando el voltaje mientras se mantiene constante el voltaje de excitación. Cuanto menor es el voltaje, menor es la velocidad y cuando el voltaje es cero, deja de girar. Porque cuando el voltaje es cero, la corriente también es cero, por lo que el motor no generará par electromagnético, ni aparecerá el fenómeno de autorrotación.







